화성 과학 실험실
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
화성 과학 실험실(Mars Science Laboratory, MSL)은 화성에서 생명체 존재 가능성을 탐사하는 것을 목표로 하는 NASA의 탐사 임무이다. 큐리오시티 로버를 사용하여 과거와 현재의 화성 환경에서 생명체를 유지할 수 있는 가능성을 조사하며, 화성의 기후, 지질, 그리고 유인 탐사를 위한 준비를 연구한다. MSL은 2011년 11월 26일 아틀라스 V 로켓으로 발사되었으며, 큐리오시티 로버는 2012년 8월 6일 게일 분화구에 착륙했다. 큐리오시티는 다양한 과학 장비를 탑재하고 있으며, 유기 분자 발견과 메탄 양의 계절적 변동 관측 등 탐사 성과를 거두었다.
더 읽어볼만한 페이지
- 화성 탐사차 - 스피릿 (탐사차)
스피릿은 2004년 화성에 착륙하여 물의 존재 증거를 찾고 지형을 분석하는 임무를 수행했으며, 예상보다 긴 6년 이상 활동하다가 2011년 임무가 종료되었다. - 화성 탐사차 - 마르스 2호
마르스 2호는 1971년 소련에서 발사된 화성 탐사선으로, 궤도선은 화성 표면과 대기를 관측하고 착륙선과의 통신을 중계할 예정이었으나 먼지 폭풍으로 표면 매핑에 어려움을 겪었고, 착륙선은 화성 표면에 연착륙하여 토양 특성을 측정하고 소형 로버를 전개할 계획이었으나 대기권 진입 중 시스템 오작동으로 파괴되었다. - 2011년 발사한 우주선 - STS-135
STS-135는 우주왕복선 프로그램의 마지막 임무로, 아틀란티스호를 이용하여 국제우주정거장에 물자 보급 및 고장난 펌프 회수, 로봇 연료 보급 임무 장비 설치 등의 임무를 수행했으며, 승무원 4명과 ISS 승무원의 협력으로 성공적으로 완료되었다. - 2011년 발사한 우주선 - 스페크트르-R
스페크트르-R은 라디오아스트론 프로젝트의 일환으로 발사된 러시아의 우주 전파 망원경으로, 지상 망원경과 협력하여 초장기선 간섭계 기술을 통해 우주 전파를 관측하며 블랙홀, 퀘이사, 펄서 등 고에너지 천체의 구조와 활동을 연구하는 임무를 수행했으나 2019년 통신 두절로 종료되었다. - NASA의 우주 탐사선 - 뉴 허라이즌스
뉴 허라이즌스는 NASA의 뉴 프런티어 계획 탐사선으로, 명왕성과 카이퍼 벨트를 탐사하며 명왕성의 표면, 지형, 대기 등을 조사하고 카이퍼 벨트 천체 아로코스의 근접 관측을 통해 초기 태양계 형성에 대한 과학적 자료를 제공했으며, 플루토늄-238을 동력원으로 2030년대까지 탐사를 진행할 예정이다. - NASA의 우주 탐사선 - 유로파 클리퍼
유로파 클리퍼는 NASA에서 주관하며 2024년 10월 14일에 발사된 목성의 위성 유로파 탐사선으로, 유로파의 거주 가능성 조사 및 향후 착륙 지점 선정에 필요한 자료 수집을 목표로 2030년 4월 목성 도착 후 44회의 근접 비행을 통해 데이터를 수집할 예정이다.

2. 미션
화성 과학 실험실(MSL) 임무의 주된 목표는 과거와 현재의 화성에서 생명체를 유지할 수 있는 가능성을 조사하는 것이다. 이를 위해 큐리오시티 로버는 당시까지 알려진 어떤 우주선보다도 정확하게 화성에 착륙하는 데 성공했다. 로버는 게일 크레이터의 아이올리스 팔루스 지역 내, 7km × 20km 크기의 작은 목표 착륙 지점 안에 안착했다. 착륙 지점은 목표 중심에서 동쪽으로 2.4km, 북쪽으로 400m 떨어진 곳으로,[6] 아이올리스 몬스(일명 "샤프 산") 근처이다. 로버는 최소 687일(화성 1년) 동안 5km × 20km 범위 내에서 탐사를 수행하도록 계획되었다.
이 임무는 NASA의 화성 탐사 프로그램의 일부이며, 캘리포니아 공과대학교의 제트 추진 연구소(JPL)가 관리하는 장기적인 로봇 화성 탐사 계획에 속한다. MSL 프로젝트에 투입된 총 비용은 약 25억달러이다.[7]
과거에 성공적으로 화성에서 활동했던 미국의 로버로는 화성 패스파인더 임무의 소저너와 화성 탐사 로버 임무의 스피릿, 오퍼튜니티가 있다. 큐리오시티는 스피릿과 오퍼튜니티보다 길이가 약 두 배 길고 무게는 다섯 배 더 나가며, 탑재한 과학 장비의 질량은 10배 이상이다.
2. 1. 목표 및 목적
MSL 임무는 다음과 같은 4가지 과학적 목표를 가지고 있다. 착륙 지점의 거주 가능성 결정, 특히 물의 역할을 포함하여 기후와 지질 연구. 또한 미래의 화성 유인 탐사를 위한 유용한 준비이기도 하다.이러한 목표에 기여하기 위해 MSL은 다음과 같은 8가지 주요 과학적 목표를 가지고 있다:[8]
;생물학:
:* (1) 유기 탄소 화합물의 특성과 목록 결정
:* (2) 생명체의 화학적 구성 요소 (탄소, 수소, 질소, 산소, 인, 황) 조사
:* (3) 생물학적 과정의 영향(생물학적 지표)을 나타낼 수 있는 특징 식별
;지질학 및 지구화학:
:* (4) 화성 표면 및 표면 근처 지질 물질의 화학적, 동위원소, 광물학적 조성 조사
:* (5) 암석과 토양을 형성하고 수정한 과정 해석
;행성 과정
:* (6) 장기간(즉, 40억 년)의 화성 대기 진화 과정 평가
:* (7) 현재 상태, 분포 및 물의 순환과 이산화 탄소 결정
;표면 방사선
:* (8) 우주 방사선, 태양 입자 현상 및 2차 중성자를 포함한 광범위한 표면 방사선 스펙트럼 특성화. 탐사 활동의 일환으로 화성으로 이동하는 동안 우주선 내부의 방사선 노출을 측정했으며, 화성 표면을 탐사하면서 지속적인 방사선 측정을 수행하고 있다. 이 데이터는 미래의 화성 유인 탐사에 중요하다.
지상 임무 약 1년 후, 고대 화성이 미생물 생명체에 우호적이었을 수 있다는 평가를 바탕으로 MSL 임무 목표는 유기 화합물 및 생체 분자의 보존 과정에 대한 예측 모델 개발로 발전했다. 이는 타포노미라고 불리는 고생물학의 한 분야이다.[9] 과거와 현재의 화성에서 생명체를 유지할 수 있는 가능성에 대해 조사한다.
2. 2. 개발 과정

화성 과학 실험실(MSL) 프로젝트는 2003년 미국 국립 연구 위원회의 10년 단위 조사 위원회가 중간 규모의 화성 탐사 임무 중 최우선 순위로 권고하면서 시작되었다.[35] 이에 따라 NASA는 2004년 4월 로버에 탑재할 과학 장비에 대한 제안을 공모했고, 같은 해 12월 14일 8개의 제안을 최종적으로 선정했다. 로버의 구성 요소에 대한 테스트와 설계 작업 역시 2004년 말부터 시작되었으며, 이 과정에는 Aerojet과 같은 기업이 참여하여 단일 추진제 엔진 설계 등을 진행했다.
개발이 진행되면서 2008년 11월에는 대부분의 하드웨어와 소프트웨어 개발이 완료 단계에 이르렀지만, 동시에 약 4억달러에 달하는 비용 초과 문제에 직면했다. 당초 계획된 발사 일정을 맞추기 위해 일부 장비를 제외하거나 기능을 단순화하는 방안까지 고려되었으나, 결국 테스트 시간이 충분하지 않다는 판단 하에 NASA는 2008년 12월 4일, 발사를 2011년 말로 연기한다고 공식 발표했다.[65] 이 발사 연기로 인해 약 4억달러의 추가 비용이 발생했고, 프로젝트의 최종 개발 비용은 24.700000000000003억달러까지 증가했다. 이는 원래 6.5억달러 예산의 중급 임무로 계획되었던 것과 비교하면 상당한 규모의 예산 초과였다.[36]
한편, 로버의 이름은 대중 공모를 통해 결정되었다. 2009년 3월 23일부터 29일까지 NASA 웹사이트에서 9개의 최종 후보 이름(어드벤처, 아멜리아, 저니, 퍼셉션, 퍼슈트, 선라이즈, 비전, 원더, 큐리오시티)을 대상으로 공개 투표가 진행되었다.[38] 그 결과, 2009년 5월 27일, 캔자스주 출신의 당시 6학년 학생이었던 클라라 마(Clara Ma)가 에세이 공모전을 통해 제출한 '큐리오시티(Curiosity, 호기심)'가 최종 이름으로 선정되었다.[66] 클라라 마는 이름 제안 이유를 다음과 같이 설명했다.
: 큐리오시티는 우리를 매일의 삶으로 이끄는 열정입니다. 우리는 질문하고 궁금해하는 필요성으로 탐험가이자 과학자가 되었습니다.
개발과 준비를 마친 MSL 탐사선, 즉 큐리오시티 로버는 연기된 일정에 따라 2011년 11월 26일 애틀러스 V 로켓에 실려 케이프 커내버럴에서 성공적으로 발사되었다.[67]
2. 3. 발사
화성 과학 실험실(MSL)은 원래 2009년 발사되어 2010년 10월 화성에 착륙할 예정이었다. 그러나 개발 과정에서 비용 초과 문제가 발생하고 시험에 충분한 시간을 확보하기 어렵다는 판단에 따라, NASA는 2008년 12월 발사를 2011년 말로 연기한다고 발표했다.[65] 이 발사 연기로 인해 약 4억달러의 추가 비용이 발생했으며, 프로젝트의 최종 비용은 약 24.700000000000003억달러에 달했다.[36]발사를 위한 준비 작업으로, 아틀라스 V 로켓의 1단 및 2단과 고체 로켓 모터가 2011년 10월 9일 발사대 인근에서 조립되었다. MSL 탐사선을 탑재한 페이로드 페어링은 2011년 11월 3일 발사대로 옮겨졌다.

MSL은 2011년 11월 26일 15:02 UTC에 미국 플로리다주의 케이프커내버럴 공군 기지 제41발사대에서 유나이티드 론치 얼라이언스(ULA)가 제공한 아틀라스 V 541 로켓에 실려 성공적으로 발사되었다.[40][67] 발사에 사용된 아틀라스 V 541 로켓은 하나의 RD-180 엔진으로 구동되는 3.8m 직경의 공통 핵심 부스터(CCB) 1단과 4개의 고체 로켓 부스터(SRB), 그리고 5m 직경의 페이로드 페어링을 갖춘 센타우르 상단 로켓으로 구성된 2단 로켓이다.[41] NASA의 발사 서비스 프로그램(Launch Services Program, LSP)이 발사 과정을 총괄했다.[42] 아틀라스 V 로켓은 이전에 화성 정찰 궤도선과 뉴 호라이즌스 탐사선 발사에도 사용된 신뢰성 있는 발사체이다.
발사 이후, 2012년 1월 11일에는 우주선의 추진기를 이용한 3시간 동안의 엔진 점화를 통해 성공적으로 궤도를 수정했다. 이 궤도 수정으로 화성 도착 예정 시각을 약 14시간 앞당길 수 있었다.
3. 착륙
화성의 희박한 대기와 큐리오시티 로버의 큰 무게 때문에 기존의 낙하산이나 에어백 방식으로는 착륙이 어려웠다. 이를 해결하기 위해 화성 과학 실험실(MSL) 임무에서는 진입, 하강 및 착륙(Entry, Descent, and Landing, EDL)이라는 혁신적인 고정밀 착륙 시스템을 사용했다. 이 시스템은 에어로쉘, 낙하산, 스카이 크레인 등 복잡한 구성 요소로 이루어져 있으며, 지구의 통제 없이 자율적으로 작동하여 약 7분간의 긴장되는 착륙 과정을 수행했다. 이 때문에 "공포의 7분"이라는 별칭으로 불리기도 한다.
EDL 과정은 크게 네 단계로 나뉜다: 유도 진입, 낙하산 강하, 로켓 분사 강하, 그리고 마지막으로 스카이 크레인을 이용한 로버 안착이다. 이 정교한 과정을 통해 큐리오시티는 2012년 8월 6일(UTC) 게일 분화구 내 목표 지점에 성공적으로 착륙했다.[10][70] 이 착륙 시스템 덕분에 이전 임무들보다 훨씬 정밀하게 원하는 지점에 로버를 내려놓을 수 있었다.
3. 1. 진입, 하강 및 착륙 (EDL) 시스템
화성에 큰 탐사선을 착륙시키는 것은 매우 어려운 과제이다. 화성의 대기는 낙하산이나 공기 제동만으로 속도를 충분히 줄이기에는 너무 얇지만, 역추진 로켓을 사용할 때는 비행 안정성을 해칠 만큼은 두껍기 때문이다. 과거 일부 화성 탐사 임무에서는 착륙 충격을 흡수하기 위해 에어백을 사용했지만, ''큐리오시티'' 로버는 이전 탐사선들보다 훨씬 무거워서 이 방식을 사용할 수 없었다.
대신 ''큐리오시티''는 화성 과학 실험실(MSL) 우주선의 강하 단계에 포함된 새로운 고정밀 진입, 강하 및 착륙(EDL, Entry, Descent, and Landing) 시스템을 이용해 화성 표면에 내려앉는 데 사용되었다. 이 EDL 시스템은 낙하산, 스카이 크레인(Sky Crane), 연료, 그리고 에어로쉘 등으로 구성되며, 총 질량은 2401kg이다.[51] 이 새로운 시스템 덕분에 ''큐리오시티''는 가로 20km, 세로 7km 크기의 매우 좁은 착륙 예상 지역 안에 정확히 착륙할 수 있었다. 이는 과거 화성 탐사 로버(MER)들이 사용했던 착륙 시스템의 목표 범위였던 150km x 20km 크기의 타원과 비교하면 훨씬 정밀하다.
이 EDL 시스템은 이전의 다른 임무들과 달리, 착륙 과정에서 지구 관제소의 실시간 명령 없이 미리 입력된 프로그램에 따라 모든 과정을 자율적으로 수행한다는 특징을 가진다. EDL 시스템은 과거 바이킹 계획에서 사용된 기술을 발전시킨 에어로쉘 구조와, 정밀 유도 진입 및 부드러운 착륙을 위한 추진 시스템을 기반으로 개발되었다. 이는 1990년대 중반 화성 패스파인더나 화성 탐사 로버 임무에서 사용된 에어백 방식과는 다른 방식이다. 우주선은 여러 시스템을 정해진 순서에 따라 정확하게 작동시켰으며, 전체 진입, 강하, 착륙 과정은 크게 네 단계로 구성된다.
3. 2. EDL 단계
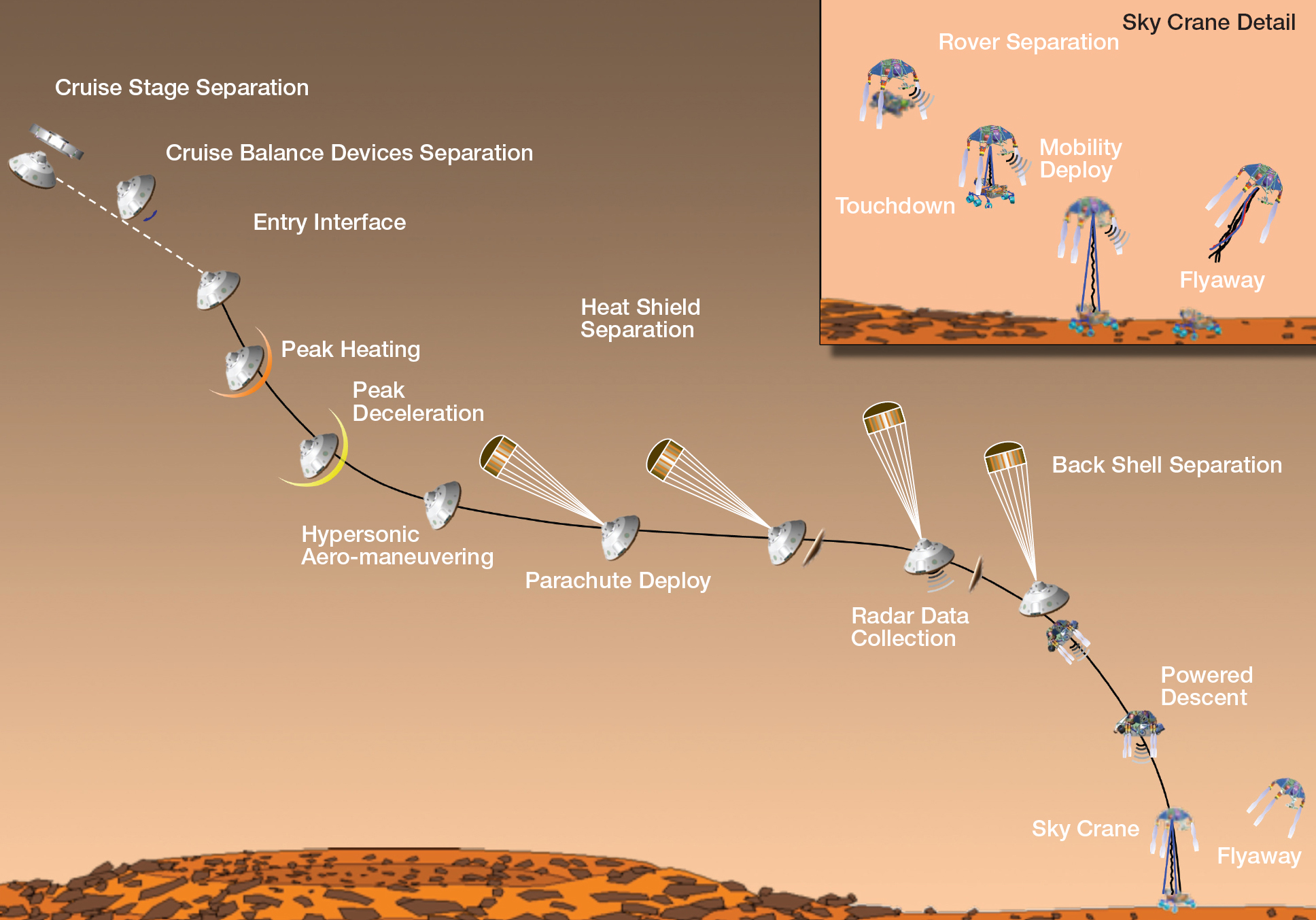
화성의 희박한 대기는 낙하산이나 공기 제동만으로 큰 탐사선을 착륙시키기 어렵게 만들며, 동시에 역추진 로켓 사용 시 안정성 문제를 야기한다. 큐리오시티는 이전의 화성 탐사 로버들보다 훨씬 무거워 기존의 에어백 착륙 방식도 사용할 수 없었다. 이러한 문제를 해결하기 위해 화성 과학 실험실(MSL) 임무에서는 진입, 강하, 착륙(Entry, Descent, and Landing, EDL)이라는 새로운 고정밀 착륙 시스템을 도입했다. 이 시스템은 에어로쉘, 낙하산, 스카이 크레인 등으로 구성되며, 총 질량은 2401kg에 달했다.[51] EDL 시스템 덕분에 큐리오시티는 20by 크기의 착륙 타원 내, 목표 지점에서 불과 2.4km 떨어진 곳에 매우 정확하게 착륙할 수 있었다.[10] 이는 이전 화성 탐사 로버들의 150by 착륙 타원보다 훨씬 정밀한 결과이다.EDL 과정은 지구와의 통신 지연 때문에 사전에 입력된 프로그램에 따라 완전히 자율적으로 진행되었으며, 약 7분 동안 이루어져 "공포의 7분"으로 불리기도 했다. 이 과정은 크게 네 단계로 나뉜다.
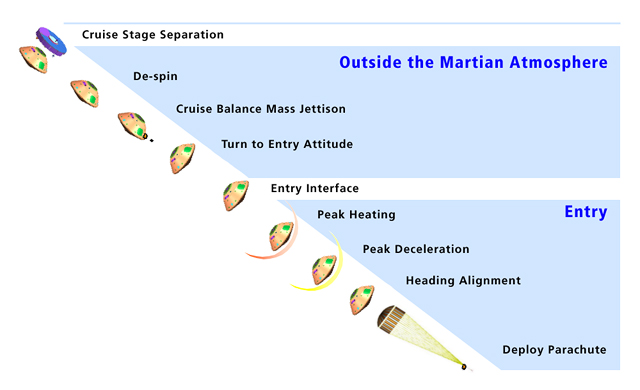
# '''유도 진입 (Guided Entry):''' 에어로쉘에 보호된 탐사선이 화성 대기권에 진입하여 공력 제동으로 속도를 줄이는 동시에, 추력기를 이용해 양력을 제어하며 미리 정해진 착륙 지점으로 정밀하게 유도하는 단계이다.
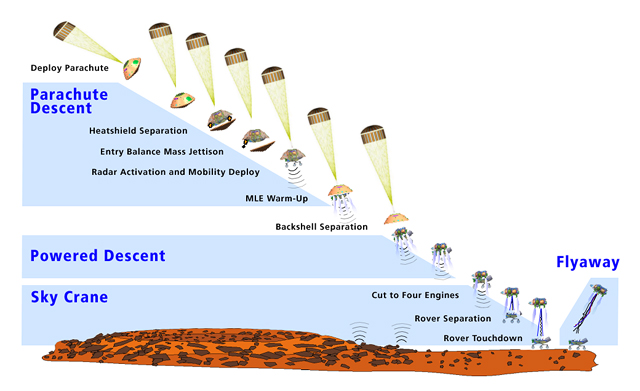
# '''낙하산 강하 (Parachute Descent):''' 속도가 초음속 영역으로 줄어들면 거대한 낙하산을 펼쳐 추가로 감속하고, 열 차폐막을 분리하는 단계이다.
# '''로켓 분사 강하 (Powered Descent):''' 낙하산 분리 후, 강하선에 장착된 로켓 엔진을 분사하여 하강 속도를 거의 0에 가깝게 줄이고 착륙 준비를 하는 단계이다.
# '''스카이 크레인 (Sky Crane):''' 강하선이 공중에 떠 있는 상태에서 케이블을 이용해 로버를 지상으로 안전하게 내려놓는 혁신적인 방식의 마지막 단계이다. 로버 착륙 후 강하선은 멀리 날아가 추락한다.
이 복잡하고 정교한 EDL 과정은 2012년 8월 6일 성공적으로 수행되었으며, 착륙 순간은 전 세계적으로 큰 관심을 받았다. NASA TV 등을 통해 320만 명 이상이 온라인으로 착륙 과정을 실시간 시청했다.[52] 큐리오시티는 563270400km의 긴 여정 끝에 목표 지점에 성공적으로 안착했다.[10]
3. 2. 1. 유도 진입
정밀 유도 진입은 탑재된 컴퓨팅 능력을 활용하여 미리 결정된 착륙 지점으로 스스로 조종하여 착륙 정확도를 수백 킬로미터 범위에서 20km로 개선했다.[54] 이러한 기능은 더 큰 착륙 타원 내에 존재할 수 있는 착륙 위험에 대한 불확실성을 제거하는 데 도움이 되었다.[54] 조종은 추력기와 방출 가능한 밸런스 질량의 조합을 사용하여 이루어졌다.[55] 방출 가능한 밸런스 질량은 캡슐의 질량 중심을 이동시켜 대기 비행 단계에서 양력 벡터를 생성할 수 있게 한다. 항법 컴퓨터는 측정을 통합하여 자동 토크 명령을 생성하는 캡슐의 위치와 자세를 추정했다. 이는 정밀 착륙 기술을 사용한 최초의 행성 임무였다.
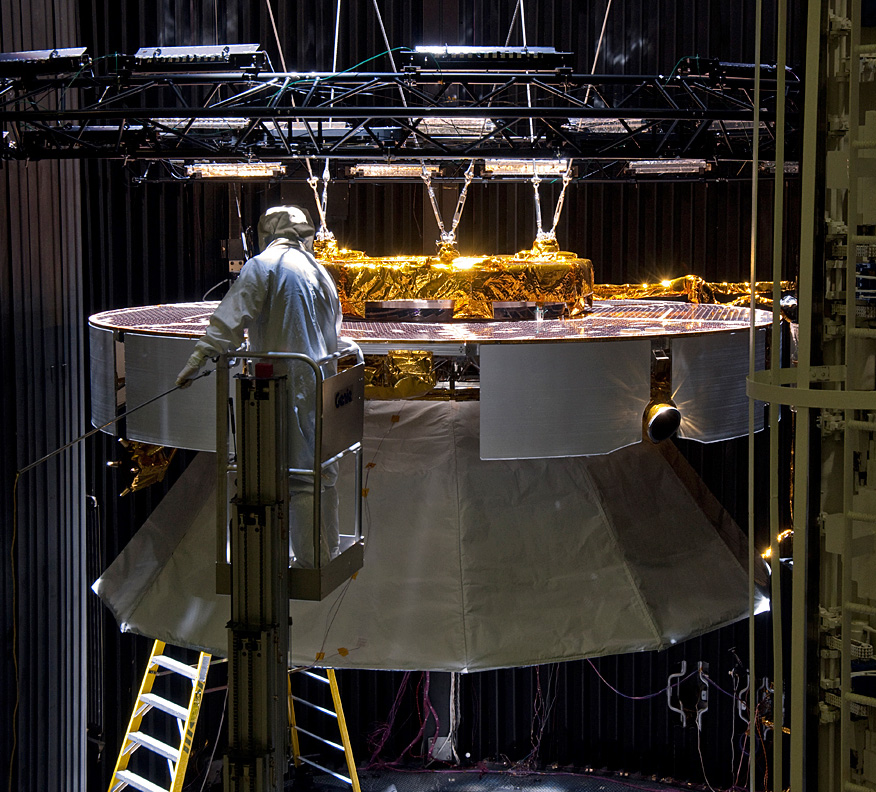
로버는 우주를 여행하는 동안과 화성에서의 대기 진입 동안 보호해주는 에어로쉘 내부에 접혀 있었다. 대기 진입 10분 전에 에어로쉘은 화성까지의 긴 비행 동안 전력, 통신 및 추진력을 제공했던 순항 단계(cruise stage)와 분리되었다. 순항 단계와 분리된 지 1분 후 에어로쉘의 추력기가 발사되어 우주선의 분당 2회전(2 rpm)을 상쇄하고 대기 진입 준비를 위해 열 차폐막이 화성을 향하도록 방향을 잡았다.
화성은 대기가 희박하기 때문에, 무거운 물체를 착륙시키는 것은 매우 어렵다. 낙하산이나 공력 제동만으로는 감속이 불충분하며, 과거에 사용된 에어백을 이용한 착륙 방식도 큐리오시티 정도의 무게에는 적용하기 어렵다. 이 때문에, MSL에서는 여러 방식을 조합하고 새로운 착륙 방식을 채택했다. 큐리오시티는 에어로쉘에 격납되어 화성 대기권에 돌입하고, 에어로쉘 외피를 이용한 공력 제동으로 감속한다. 이 에어로쉘은 직경 4.5m로 당시까지 우주용으로는 가장 컸으며, Phenolic Impregnated Carbon Ablator|페놀 함침 탄소 절제체eng(PICA)라는 내열재로 고열로부터 보호된다. (MSL용으로 개발된 PICA는 스페이스X사가 PICA-X라는 이름으로 드래곤 우주선의 열 차폐막에 채용했다.) 이를 통해 돌입 시의 속도 5.3km/s에서 6km/s를 낙하산이 펼쳐지는 속도인 마하 2(약 470 m/s)까지 화성 대기와의 마찰을 통한 삭마 방식 열 차폐(ablative heat shield)를 통해 우주선의 속도를 줄였다. 진입 후 1분 15초에 열 차폐막은 대기압이 운동 에너지를 열로 변환하면서 최대 2090°C의 최고 온도를 경험했다. 최고 가열 10초 후 감속은 15 g로 정점을 찍었다.
착륙 정밀도의 향상은 아폴로 사령선이 아폴로 계획에서 지구로 귀환하는 데 사용된 알고리즘에서 파생된 진입 유도 알고리즘을 통해 달성되었다. 이 유도 방식은 에어로쉘이 받는 양력을 사용하여 거리에서 감지된 모든 오차를 수정하며 비행하여 목표 착륙 지점에 도달한다. 에어로쉘이 양력을 얻기 위해서는 질량 중심이 축 중심선에서 벗어나, 대기 비행 시 중심이 벗어난 트림 각(trim angle)을 가져야 한다. 이는 대기 진입 몇 분 전에 두 개의 75kg 텅스텐 추 무게로 구성된 밸러스트 질량을 방출함으로써 달성되었다. 양력 벡터는 한 쌍당 약 500 N의 추력을 생성하는 네 쌍의 반작용 제어 시스템(RCS) 추력기에 의해 제어되었다. 양력 방향을 변경할 수 있는 이러한 능력은 우주선이 주변 환경에 반응하고 착륙 구역으로 조종할 수 있게 했다. 낙하산 전개 전에 진입 차량은 질량 중심 오프셋이 제거되도록 6개의 25kg 텅스텐 추 무게로 구성된 더 많은 밸러스트 질량을 방출했다.
3. 2. 2. 낙하산 강하
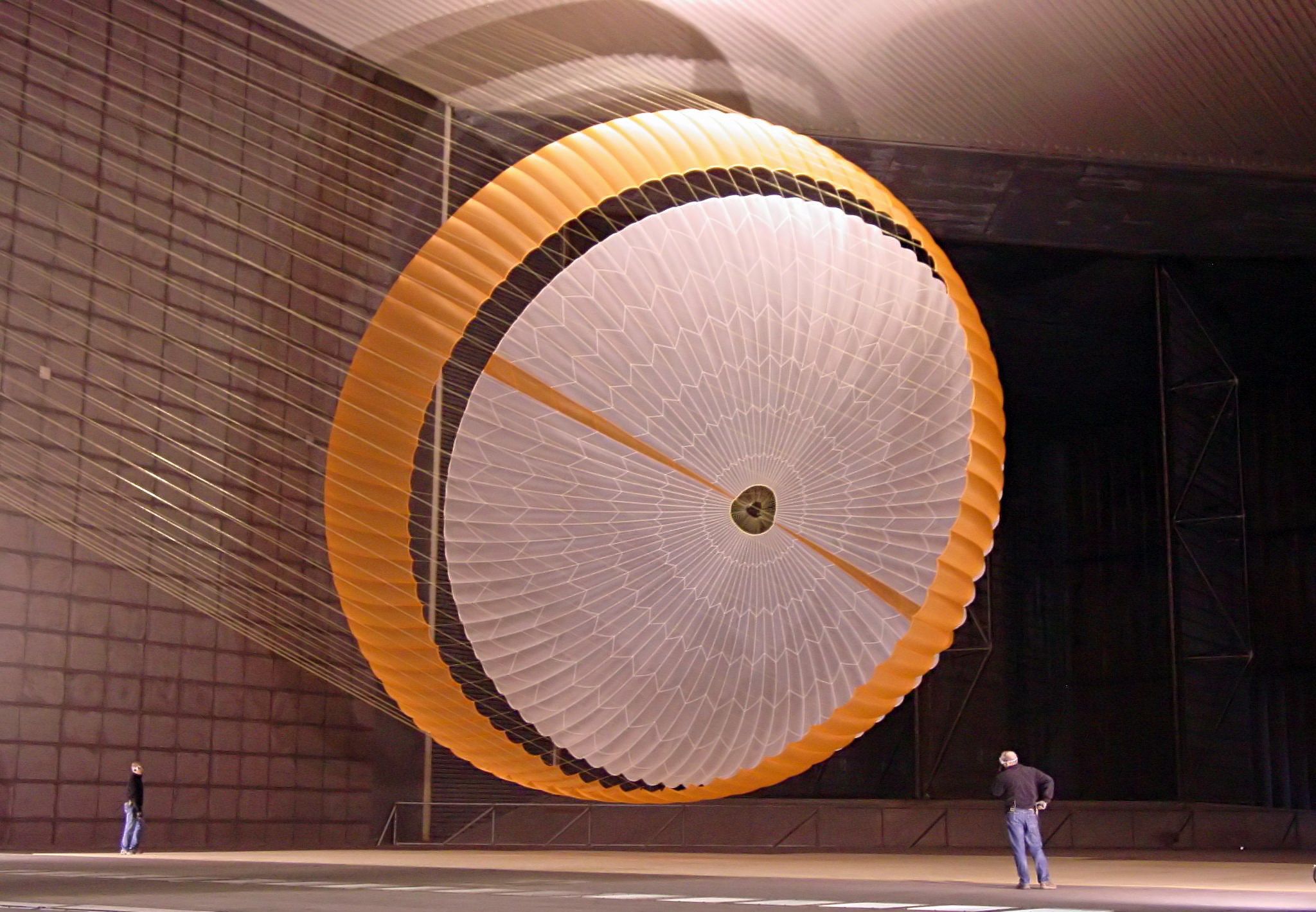
진입 단계가 완료되고 캡슐의 속도가 고도 약 10km에서 약 470m/s로 줄어들면, 초음속 낙하산이 펼쳐진다. 이는 바이킹 계획, 화성 탐사선, 화성 탐사 로버와 같은 이전 착륙선에서 사용된 방식과 유사하다.
낙하산은 80개의 서스펜션 라인을 가지고 있으며, 길이는 50m가 넘고 지름은 약 16m에 달한다. 마하 2.2의 속도에서도 펼쳐질 수 있도록 설계되었으며, 화성 대기에서 최대 289kN의 항력을 생성할 수 있다. 낙하산이 완전히 펼쳐진 후에는 탐사선을 보호하던 열 차폐막(내열 실드)이 분리되어 떨어져 나간다.
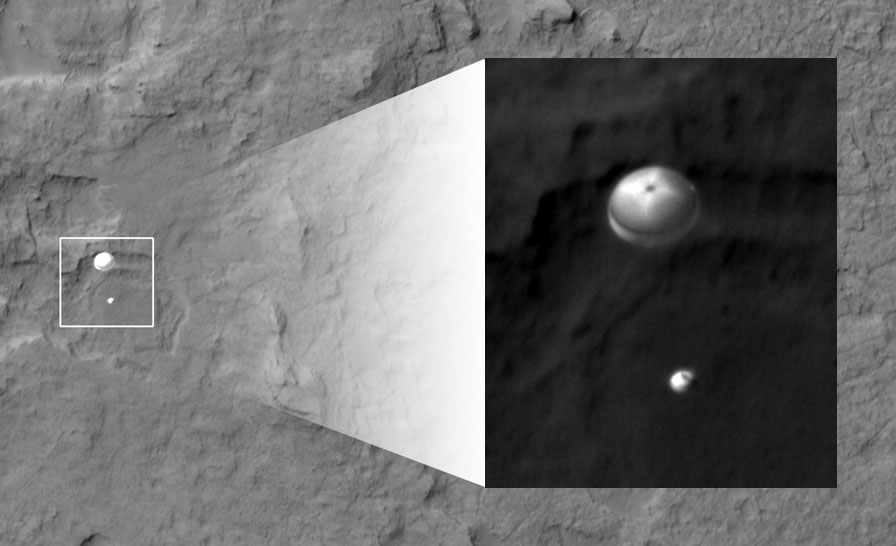
이후 로버 하단에 장착된 화성 강하 이미저(MARDI) 카메라가 작동을 시작한다. 고도 3.7km 이하부터 착륙 성공 확인까지 약 2분 동안, 초당 4프레임의 속도로 1600×1200 픽셀 해상도의 컬러 이미지를 촬영한다.[31] 이 이미지를 통해 로버의 정확한 착륙 지점을 신속하게 파악할 수 있다. 한편, 화성 정찰 궤도선(MRO)은 궤도에서 낙하산을 펼치고 하강하는 화성 과학 실험실(MSL) 탐사선의 모습을 성공적으로 촬영하기도 했다.
3. 2. 3. 로켓 분사 강하
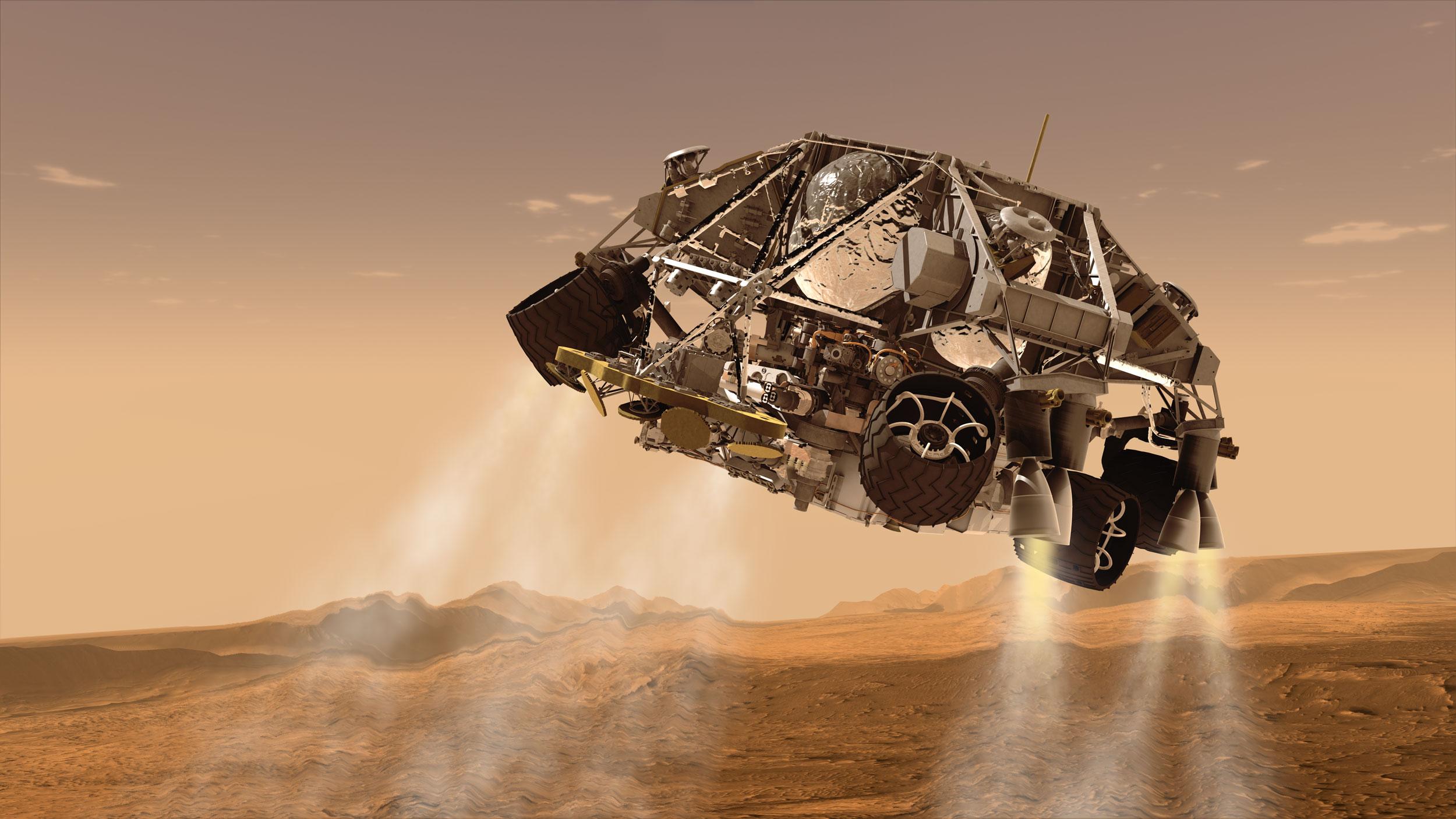
낙하산 제동 후, 고도 약 1.8km에서 여전히 약 100m/s의 속도로 이동하면서, 탐사 로버와 강하 단계가 에어로셸에서 분리되었다. 강하 단계는 탐사 로버 위에 위치한 플랫폼으로, 이 플랫폼을 둘러싸고 뻗어 있는 팔에 8개의 가변 추력 단일 추진제 히드라진 로켓 추력기가 장착되어 강하 속도를 늦춘다. 각각의 로켓 추력기는 화성 착륙 엔진(Mars Lander Engine, MLE)이라고 불리며,[48] 400N에서 3100N 사이의 추력을 생성하며, 바이킹 착륙선에 사용된 것에서 파생되었다. 레이다 고도계는 고도와 속도를 측정하여 탐사 로버의 비행 컴퓨터에 데이터를 제공했다. 한편, 탐사 로버는 스카이 크레인 시스템에 의해 강하 단계 아래로 내려지면서 수납된 비행 구성에서 착륙 구성으로 변환되었다.
3. 2. 4. 스카이 크레인
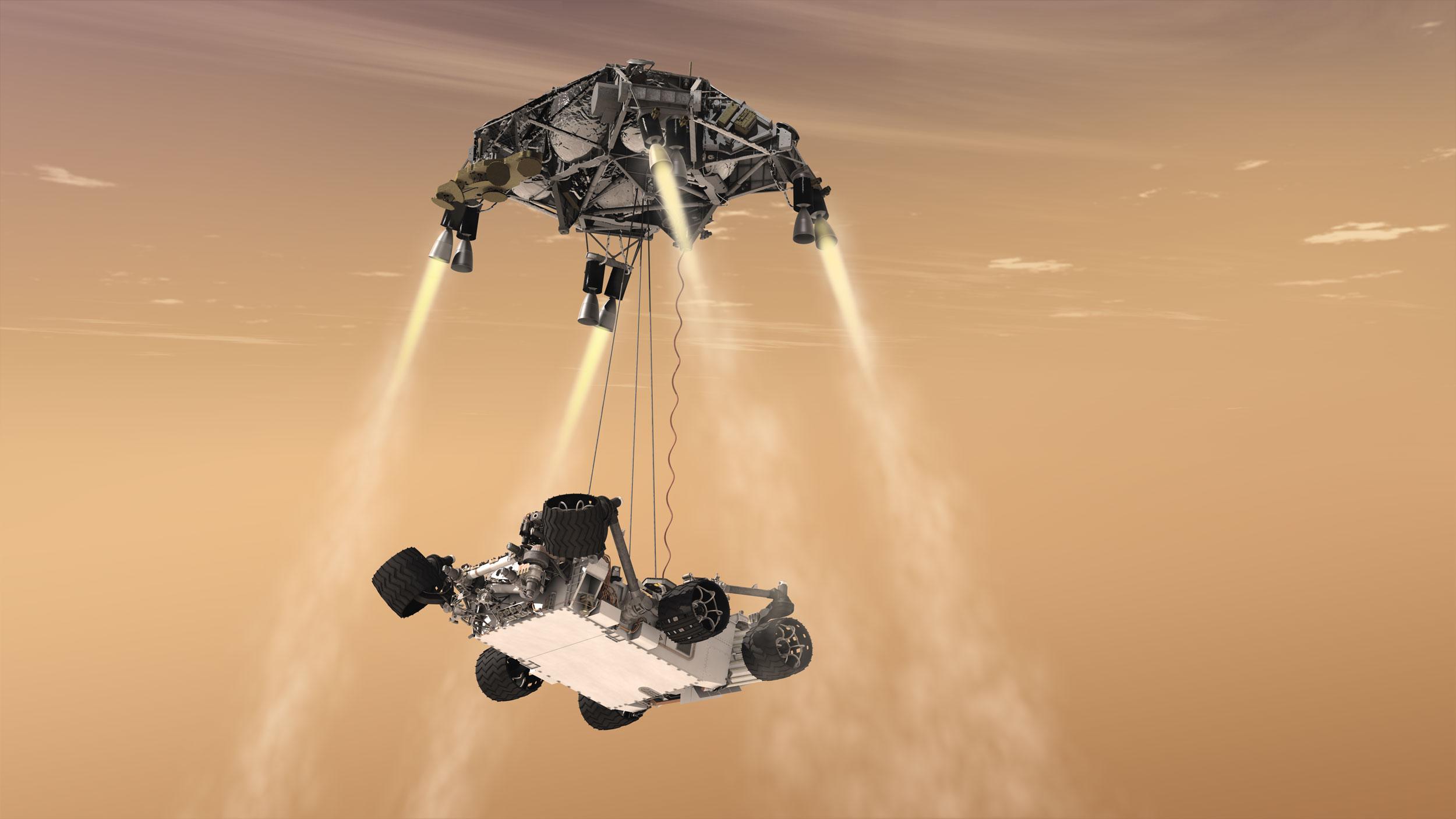
화성 과학 실험실(MSL)은 이전의 화성 착륙선 및 로버와는 다른 착륙 시스템을 사용했는데, 여기에는 몇 가지 이유가 있다. 큐리오시티는 화성 탐사선과 화성 탐사 로버에서 사용된 에어백 착륙 시스템을 적용하기에는 너무 무거웠다. 또한, 다리가 있는 착륙 방식을 사용하면 몇 가지 설계상의 문제가 발생할 수 있었다. 예를 들어, 착륙 시 로버의 기기를 손상시킬 수 있는 먼지 구름이 생기지 않도록 엔진이 지면에서 충분히 높이 위치해야 했고, 이를 위해서는 무게 중심을 낮게 유지하기 위해 폭이 넓고 긴 착륙 다리가 필요했다. 다리가 있는 착륙선은 로버가 표면으로 내려갈 경사로도 필요했는데, 이는 바위나 지형의 기울기 때문에 큐리오시티가 착륙선에서 성공적으로 벗어나지 못할 위험을 안고 있었다. 이러한 문제에 직면하여 MSL 엔지니어들은 스카이 크레인이라는 혁신적인 대안을 고안했다.
스카이 크레인 시스템은 약 7.6m 길이의 케이블(테더)을 이용해 로버를 내려 화성 표면에 바퀴가 아래를 향하도록 부드럽게 착륙시키는 방식이다. 이 시스템은 세 개의 나일론 테더로 로버를 지탱하는 브라이들(bridle, 고삐)과, 강하 단계와 로버 간의 정보 및 전력을 전달하는 전기 케이블로 구성된다. 지지 및 데이터 케이블이 풀리면서 로버의 6개 전동 바퀴가 제자리에 고정된다. 강하 단계에서 약 7.5m 아래로 내려온 지점에서 스카이 크레인 시스템은 하강을 멈추고 로버를 착륙시킨다. 로버가 착륙하면, 바퀴에 가해지는 무게를 감지하여 단단한 지면에 닿았는지 확인하기 위해 2초간 기다린다. 이후 브라이들과 제대 코드에 있는 케이블 커터를 작동시키기 위해 여러 개의 화약식 체결구(소형 폭발 장치)를 발사하여 강하 단계와 분리된다. 분리된 강하 단계는 로버에서 약 650m 떨어진 곳으로 날아가 추락한다.[56] 스카이 크레인 개념은 이전의 어떤 우주 임무에서도 사용된 적이 없는 새로운 시도였다.[68]
3. 3. 착륙지
60곳이 넘는 잠재적 착륙 지점을 평가한 끝에, 2011년 7월 게일 분화구가 최종 착륙 지점으로 선정되었다. 착륙 지점 선정의 주요 목표는 과거 또는 현재의 미생물 생명체를 지원했을 가능성이 있는 특정 지질 환경을 식별하는 것이었다. 계획자들은 과거 물의 존재에 대한 형태학적, 광물학적 증거를 모두 가진 곳을 선호했으며, 여러 수화 광물, 특히 점토 광물과 황산염 염이 풍부하게 나타나는 지점을 중요하게 고려했다. 적철광, 다른 산화철, 황산염 광물, 규산염 광물, 실리카, 염화물 광물 등은 화석 보존에 유리한 환경으로 여겨지는데, 이들은 지구에서도 화석 형태와 분자 보존을 돕는 것으로 알려져 있다. 생존 가능한 환경의 증거를 찾기 위해 지형적으로 흥미로운 곳이 선호되었지만, 로버가 안전하게 착륙하고 이동할 수 있어야 한다는 제약 조건도 있었다.
공학적 제약 조건으로는 화성 적도로부터 남북 위도 45° 이내, 기준 기준면으로부터 고도 1km 미만이어야 했다. 첫 번째 MSL 착륙 지점 워크숍에서는 33곳의 후보지가 확인되었고, 2007년 말 두 번째 워크숍에서는 6곳으로, 2008년 11월 세 번째 워크숍에서는 최종 4곳의 후보지로 압축되었다.
최종 후보지 4곳은 다음과 같다.
네 번째 착륙 지점 워크숍은 2010년 9월 말, 다섯 번째이자 마지막 워크숍은 2011년 5월 16일부터 18일까지 개최되었다. 2011년 7월 22일, 게일 분화구가 화성 과학 실험실 임무의 최종 착륙 지점으로 공식 발표되었다.
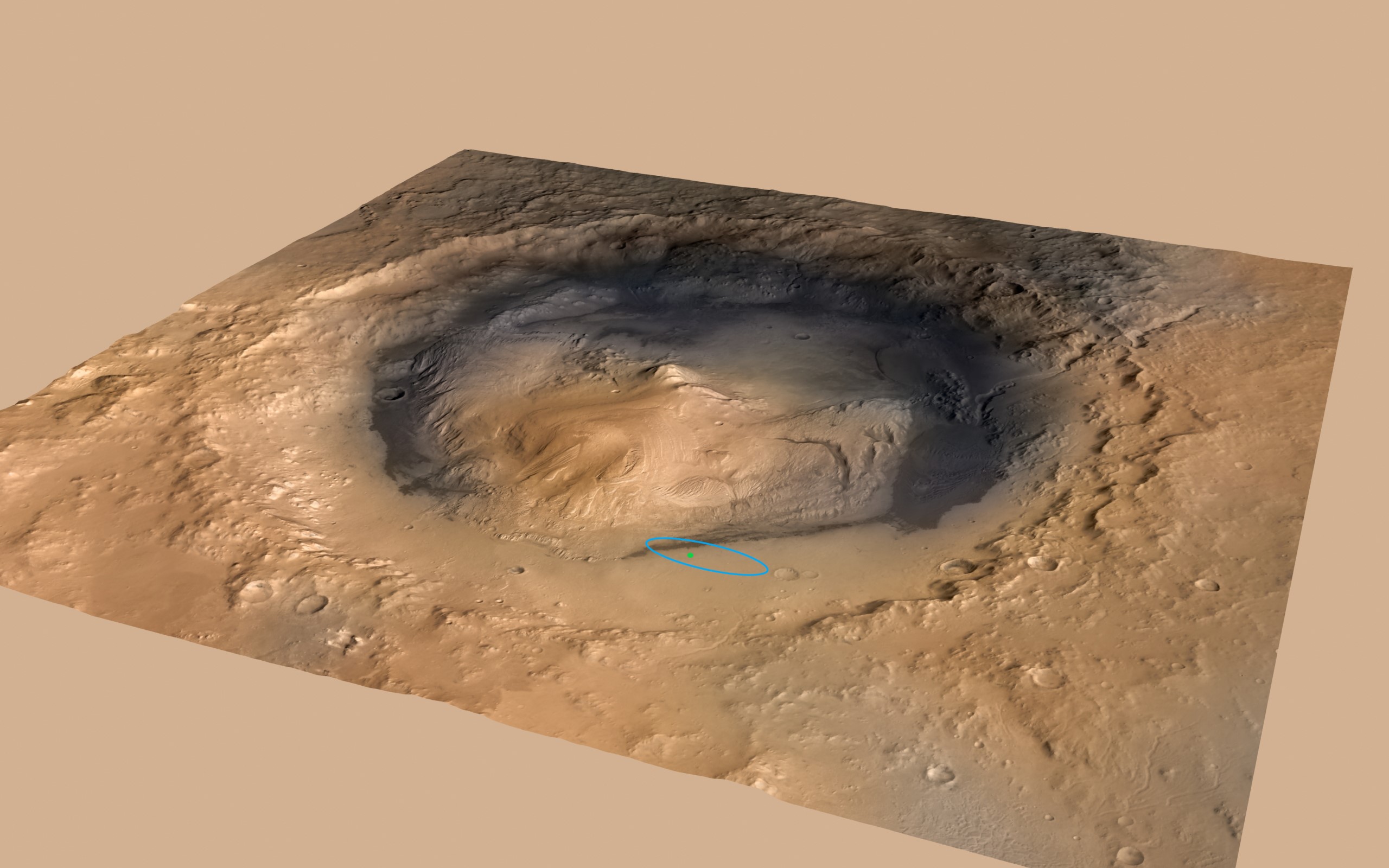
MSL의 착륙 지점은 게일 분화구이다. 게일 분화구 내부에는 아이올리스 몬스(Aeolis Mons, 비공식 명칭 "샤프 산")라는 이름의 산이 있으며,[57] 이 산은 분화구 바닥에서 약 5.5km 높이로 솟아 있는 층상 암석으로 이루어져 있어 ''큐리오시티''의 주요 탐사 대상이다. 착륙 지점은 이 산 앞, 분화구 내부의 아이올리스 팔루스(Aeolis Palus) 평원에 위치한 "Yellowknife" ''Quad 51''[58][59][60][61] 지역의 비교적 평탄한 곳이다. 목표 착륙 지점은 20km × 7km 크기의 타원형 구역이었다. 게일 분화구 자체의 직경은 154km이다.
''큐리오시티''는 약 약 5.6327억km의 여정 끝에, 2012년 8월 6일 05:17 UTC (한국 시간 14:17)에 성공적으로 착륙했으며,[70] 실제 착륙 지점은 목표 타원의 중심에서 2.4km밖에 벗어나지 않았다.[62]
2012년 8월 22일, NASA는 로버의 착륙 지점을 브래드버리 랜딩(Bradbury Landing)으로 명명한다고 발표했다. 이는 착륙 약 2개월 전에 세상을 떠난 유명 SF 소설가 레이 브래드버리를 기리기 위한 것으로, 발표일인 8월 22일은 그의 생일이기도 하다.[63][71]
4. 탐사차 큐리오시티
'''큐리오시티'''(Curiosity)는 미국 항공 우주국(NASA)의 화성 과학 실험실(MSL) 임무의 핵심인 화성 탐사 로버이다. 이 로버는 2004년 화성에 착륙했던 마스 탐사 로버(MER)인 스피릿과 오퍼튜니티보다 약 5배 더 무겁고, 10배 더 많은 과학 장비를 탑재하고 있다.
큐리오시티의 주된 임무는 화성 표면의 토양과 암석을 채취하고 분석하여, 과거 또는 현재의 생명체 존재 가능성을 포함한 화성의 환경과 지질학적 특성을 조사하는 것이다. 탐사차는 최소 1 화성년(687 지구일, 약 2.2 지구 년) 동안 5km x 20km 범위 내에서 활동하며 이전 로버들보다 훨씬 넓은 지역을 탐사하도록 설계되었다.
2012년 8월 6일, 큐리오시티는 화성의 게일 크레이터 내 아이올리스 팔루스 지역, 아이올리스 몬스(일명 "샤프 산") 근처에 성공적으로 착륙했다. 착륙 지점은 7km x 20km 크기의 목표 착륙 지점 내에 있었으며, 목표 중심에서는 동쪽으로 약 2.4km 떨어진 곳이었다.[6]
화성 과학 실험실 임무는 NASA의 장기적인 로봇 화성 탐사 계획인 화성 탐사 프로그램의 일부이며, 캘리포니아 공과대학교의 제트 추진 연구소(JPL)가 관리한다. 이 프로젝트의 총비용은 약 25억달러에 달한다.[7] 이전의 성공적인 미국 화성 로버로는 화성 패스파인더 임무의 소저너와 MER 임무의 스피릿, 오퍼튜니티가 있다.
큐리오시티의 자세한 사양, 탑재된 과학 장비, 그리고 주요 탐사 성과는 이어지는 섹션에서 다룬다.
4. 1. 사양
큐리오시티 로버는 길이가 3m이고 총 중량은 900kg에 달하며, 이 중 80kg은 과학 장비의 무게이다. 이는 과거 화성 탐사 로버(MER)의 길이 1.5m, 무게 174kg, 과학 장비 무게 6.8kg과 비교했을 때 상당히 크고 무거워진 것이다. 큐리오시티는 75cm 높이의 장애물을 넘을 수 있으며, 자율 항법 시 최대 90m/h의 속도로 이동할 수 있다. 하지만 실제 탐사 환경(전력 수준, 지형, 미끄러짐 등)을 고려하면 평균 이동 속도는 30m/h 정도가 될 것으로 예상된다. 로버는 2년의 기본 임무 기간 동안 최소 19km를 이동하는 것을 목표로 한다.전력원으로는 플루토늄-238 4.8kg의 방사성 붕괴열을 이용하는 다중 임무 방사성 동위원소 열전 발전기(MMRTG)를 사용한다. 화성 탐사에서 방사성 동위원소 열전 발전기(RTG)를 사용하는 것은 바이킹 1호와 바이킹 2호 착륙선 이후 처음이다. MMRTG는 보잉사에서 개발한 최신 모델로, 무게는 약 50kg이며, 발사 시 사고나 재진입 시에도 플루토늄이 유출되지 않도록 견고하게 설계되었다.[81] 이 발전기는 밤낮이나 계절 변화에 관계없이 안정적인 전력을 공급하며, 미션 초기에는 약 2000W의 열에너지로부터 125W의 전력을 생산하고, 14년 후에도 100W의 전력을 유지할 수 있다. 이를 통해 큐리오시티는 하루에 2.5kWh의 전력을 확보할 수 있는데, 이는 태양 전지를 사용했던 MER이 하루 약 0.6kWh를 생산했던 것과 비교하면 훨씬 많은 양이다. 또한, MMRTG에서 발생하는 폐열은 파이프를 통해 로버 내부 시스템의 온도를 유지하는 데 활용된다.
큐리오시티가 활동할 지역의 화성 표면 온도는 30°C에서 -127°C 사이를 오갈 것으로 예상된다. 이러한 극한의 온도 변화에 대응하기 위해 로버에는 열 제거 시스템(Heat rejection system, HRS)이 탑재되어 있다. 이 시스템은 총 길이 60m의 파이프 내부에 특수 유체를 순환시키며, MMRTG의 폐열을 이용해 로버 내부 장비들을 따뜻하게 유지한다. 반대로 내부 온도가 너무 높아질 경우에는 외부로 열을 방출하여 냉각하는 기능도 수행한다.
컴퓨터 시스템의 주 저장 장치 용량은 약 4기가바이트이다. 발사 당시에는 이 용량의 대부분을 복잡한 착륙 과정에 필요한 소프트웨어가 차지하고 있었기 때문에, 초기 탐사 활동에 사용할 수 있는 공간은 제한적이었다. 하지만 로버의 소프트웨어는 지구에서 원격으로 업데이트할 수 있도록 설계되었으며, 화성 착륙 후에는 불필요해진 착륙 관련 소프트웨어를 삭제하고 본격적인 과학 탐사를 위한 관측 장비 제어 소프트웨어로 교체하여 운용된다.[82]
4. 2. 탑재 과학 장비
- '''APXS''' (Alpha Particle X-ray Spectrometer): 토양 및 암석 샘플에 포함된 원소의 종류와 양을 분석하는 장비이다.
- '''ChemCam''' (Chemistry and Camera complex): 적외선 레이저를 이용하여 최대 7m 떨어진 토양이나 암석 표면을 증발시킨 후, 발생하는 빛의 스펙트럼을 분석하여 구성 성분을 알아낸다.
- '''CheMin''': X선 회절 및 형광 분석을 통해 암석과 토양 샘플에 포함된 광물의 종류를 식별하고 정량화한다.
- '''DAN''' (Dynamic Albedo of Neutrons): 중성자를 이용하여 화성 표면 근처의 수소, 얼음, 그리고 물의 존재 여부와 양을 측정한다.
- '''MAHLI''' (Mars Hand Lens Imager): 로버의 로봇 팔 끝에 장착된 카메라로, 암석과 토양의 현미경 이미지를 촬영하여 세밀한 질감과 구조를 관찰할 수 있다.
- '''MARDI''' (Mars Descent Imager): 큐리오시티가 화성 대기권에 진입하여 표면에 착륙하는 동안 지표면의 컬러 이미지를 촬영한다. 약 2분 동안 초당 5장의 속도로 이미지를 촬영하여 착륙 지점의 지형 정보를 얻는다.
- '''마스트 카메라''' (MastCam): 로버의 마스트(돛대)에 설치된 두 대의 카메라 시스템이다. 여러 스펙트럼 대역에서 트루 컬러 이미지를 촬영할 수 있으며, 720p (1280x720) 고화질의 동영상 촬영 기능도 갖추고 있다. 초당 최대 10프레임의 속도로 촬영이 가능하다. 중해상도 카메라(MAC, Medium Angle Camera)와 고해상도 카메라(NAC, Narrow Angle Camera)로 구성되어 있다.
- '''RAD''' (Radiation Assessment Detector): 화성 표면에서 우주선과 태양으로부터 오는 고에너지 입자 및 중성자를 포함한 광범위한 방사선 환경을 측정하고 특성화한다. 이 데이터는 미래의 화성 유인 탐사 시 우주비행사의 안전을 확보하는 데 중요하다.
- '''REMS''' (Rover Environmental Monitoring Station): 화성의 대기압, 습도, 온도, 바람의 속도와 방향, 그리고 자외선 방사선량 등 화성의 기상 환경을 종합적으로 측정하는 장비이다.
- '''SAM''' (Sample Analysis at Mars): 로버가 채취한 암석, 토양 및 대기 샘플의 화학 조성을 분석하는 복합 장비이다. 특히 생명체의 구성 요소가 될 수 있는 유기 화합물과 특정 동위원소의 비율을 측정하여 과거 또는 현재의 생명체 존재 가능성을 탐색한다. 시료를 가열하여 발생하는 가스를 분석하는 기능도 포함한다.
4. 3. 탐사 성과 (참고: 이 부분은 추가적인 자료 조사가 필요)
2012년 8월 6일, NASA는 큐리오시티가 게일 크레이터 안의 에올리스 몬스 기슭에 성공적으로 착륙했다고 발표했다[69][70]。 착륙 지점은 탐사팀의 제안에 따라, 착륙 약 2개월 전에 사망한 소설가 레이 브래드버리를 기리기 위해 그의 생일인 8월 22일에 맞춰 "브래드버리 랜딩"으로 명명되었다[71]。
2013년 2월 8일, 큐리오시티는 화성 표면의 암석에 직경 1.6cm, 깊이 6.4cm의 구멍을 뚫어 시료를 채취하는 데 성공했다. 이는 1960년대 화성 탐사 시작 이후 최초의 본격적인 암석 시료 채취였다[72]。
탐사 과정에서 큐리오시티의 알루미늄 합금 재질 바퀴에 문제가 발생하기도 했다. 바퀴에는 JPL의 모스 부호(•−−− •−−• •−••)를 자국으로 남기도록 구멍이 뚫려 있었는데[74], 2013년 가을부터 예상보다 빠른 속도로 마모가 진행되어 구멍 외에도 찌그러짐과 손상이 확인되었다[75][76]。 이에 운용팀은 험한 지형과 뾰족한 바위를 피해 주행 경로를 신중하게 선택하고, 소프트웨어 패치를 통해 바퀴 마모 원인을 조사하는 등 대응책을 마련했다[77]。
2014년 4월 2일, 큐리오시티는 총 주행 거리 6.1km를 이동하여 주요 조사 지점인 "킴벌리"(킴벌리, 웨스턴오스트레일리아주 지역명에서 유래)에 도착했다. 4가지 종류의 암석이 겹쳐 있는 이곳에서의 조사는 이전에 수행된 "옐로나이프 만" 분지 조사 이후 가장 큰 규모로 진행되었다[78]。
2018년 6월 7일, NASA는 큐리오시티가 화성 토양에서 유기 분자를 발견했다고 발표했다[79][80]。 이는 화성에 생명체가 존재했거나 존재할 가능성을 시사하는 중요한 발견이다. 또한, 화성 대기의 메탄 농도가 계절에 따라 변동한다는 사실도 함께 발표되었다[79]。
2022년 4월, 큐리오시티의 탐사 임무는 3년 더 연장되었다. 2023년 5월 기준으로, 큐리오시티는 화성에서 3900일 이상 활동하며 총 29km 이상을 주행했다.
5. 미디어



참조
[1]
뉴스
Video from rover looks down on Mars during landing
https://www.nbcnews.[...]
2012-10-07
[2]
뉴스
Watch Curiosity Descend onto Mars
http://www.skyandtel[...]
2012-10-07
[3]
웹사이트
Where Is Curiosity?
https://mars.nasa.go[...]
NASA
2023-05-30
[4]
뉴스
Touchdown! Huge NASA Rover Lands on Mars
http://www.space.com[...]
2012-12-14
[5]
웹사이트
MSL Sol 3 Update
https://www.youtube.[...]
NASA Television
2012-08-08
[6]
간행물
Mars Science Laboratory Navigation Results
http://issfd.org/ISS[...]
[7]
뉴스
MSL Readings Could Improve Safety for Human Mars Missions
http://www.spacenews[...]
2014-06-18
[8]
웹사이트
Objectives - Mars Science Laboratory
http://mars.jpl.nasa[...]
[9]
논문
Habitability, Taphonomy, and the Search for Organic Carbon on Mars
2014-01-24
[10]
뉴스
Impressive' Curiosity landing only 1.5 miles off, NASA says
http://www.cnn.com/2[...]
2012-08-10
[11]
웹사이트
Mars Science Laboratory, Communications With Earth
http://mars.jpl.nasa[...]
JPL
[12]
뉴스
Distance from Earth to Mars
http://www.universet[...]
2012-08-17
[13]
웹사이트
Watch NASA's Next Mars Rover Being Built Via Live 'Curiosity Cam'
http://www.nasa.gov/[...]
2011-09-13
[14]
웹사이트
MSL Science Corner – Chemistry & Mineralogy (CheMin)
http://msl-scicorner[...]
2012-08-24
[15]
웹사이트
Mars Science Laboratory Participating Scientists Program – Proposal Information Package.
http://earthweb.ess.[...]
Washington University
2010-12-14
[16]
논문
Field Deployment of A Portable XRD/XRF Iinstrument On Mars Analog Terrain
http://www.icdd.com/[...]
2012-08-24
[17]
웹사이트
Sample Analysis at Mars (SAM) Instrument Suite
http://ael.gsfc.nasa[...]
NASA
2008-10
[18]
웹사이트
Making Sense of Mars Methane
http://www.astrobio.[...]
2008-06-09
[19]
논문
Multilaser Herriott cell for planetary tunable laser spectrometers
[20]
논문
The Sample Analysis at Mars Investigation and Instrument Suite
[21]
논문
Radiation Will Make Astronauts' Trip to Mars Even Riskier
2013-05-31
[22]
논문
Measurements of Energetic Particle Radiation in Transit to Mars on the Mars Science Laboratory
https://semanticscho[...]
2013-05-31
[23]
뉴스
Data Point to Radiation Risk for Travelers to Mars
https://www.nytimes.[...]
2013-05-31
[24]
논문
The Dynamic Albedo of Neutrons (DAN) Experiment for NASA's 2009 Mars Science Laboratory
[25]
웹사이트
MSL Science Corner: Dynamic Albedo of Neutrons (DAN)
http://msl-scicorner[...]
NASA/JPL
2009-09-09
[26]
웹사이트
Curiosity's Mars travel plans tentatively mapped
https://www.cbsnews.[...]
2012-08-18
[27]
웹사이트
NASA - NSSDCA - Spacecraft - Details
https://nssdc.gsfc.n[...]
[28]
웹사이트
Rover Environmental Monitoring Station for MSL mission
http://www-mars.lmd.[...]
Pierre und Marie Curie University
2012-08-06
[29]
서적
The design and engineering of Curiosity : how the Mars Rover performs its job
2018-03-27
[30]
웹사이트
ChemCam - ChemCam - How does ChemCam work?
http://www.msl-chemc[...]
[31]
웹사이트
MSL Science Corner: Mars Descent Imager (MARDI)
http://msl-scicorner[...]
[32]
웹사이트
MSL Picture of the Day: T-27 Days: instruments: MARDI
http://www.explorema[...]
[33]
웹사이트
Raw Images - Mars Science Laboratory
http://mars.jpl.nasa[...]
[34]
논문
The Photo-Geek's Guide to Curiosity Rover's 17 Cameras
https://www.wired.co[...]
2012-08-15
[35]
서적
New Frontiers in the Solar System: An Integrated Exploration Strategy
https://www.nap.edu/[...]
2002-07-11
[36]
웹사이트
GAO Slams JWST, MSL Cost Overruns
https://spacepolicyo[...]
2018-12-30
[37]
웹사이트
Curiosity Rover Begins Mars Mission
https://www.youtube.[...]
YouTube
2012-08-06
[38]
웹사이트
The Finalists
https://web.archive.[...]
[39]
웹사이트
Atlas V
https://www.ulalaunc[...]
United Launch Alliance
2018-05-01
[40]
뉴스
NASA Launches Super-Size Rover to Mars
https://www.newspape[...]
2011-11-27
[41]
웹사이트
United Launch Alliance Atlas V Rocket Successfully Launches NASA's Mars Science Lab on Journey to Red Planet
https://web.archive.[...]
United Launch Alliance
2011-11-26
[42]
웹사이트
NASA Announces Mars Science Lab Mission Launch Contract
https://www.nasa.gov[...]
NASA
2018-05-01
[43]
뉴스
After Trip of 352 Million Miles, Cheers for 23 Feet on Mars
https://www.nytimes.[...]
2012-08-22
[44]
서적
2008 IEEE Aerospace Conference
IEEE Explore
2008-03-01
[45]
웹사이트
Follow Curiosity's descent to Mars
https://web.archive.[...]
2012
[46]
웹사이트
Orbiter Spies Where Rover's Cruise Stage Hit Mars
http://www.jpl.nasa.[...]
[47]
뉴스
Mars Science Laboratory begins cruise to red planet
https://web.archive.[...]
2012-08-21
[48]
간행물
Mars Science Laboratory: Entry, Descent, and Landing System Performance – System and Technology Challenges for Landing on the Earth, Moon, and Mars
https://ntrs.nasa.go[...]
[49]
웹사이트
Spacecraft Attitude Dynamics and Control
https://web.archive.[...]
2012-08-11
[50]
웹사이트
Status Report – Curiosity's Daily Update
https://web.archive.[...]
NASA
2012-08-06
[51]
웹사이트
Mission: Spacecraft
https://mars.nasa.go[...]
NASA
2018-06-12
[52]
뉴스
Viewers opted for the Web over TV to watch Curiosity's landing
http://news.cnet.com[...]
2012-08-09
[53]
뉴스
MSL Sol 4 briefing
https://www.youtube.[...]
[54]
웹사이트
MSL – Guided Entry
http://mars.jpl.nasa[...]
NASA
2012-08-08
[55]
논문
The RCS Attitude Controller for the Exo-Atmospheric And Guided Entry Phases of the Mars Science Laboratory
http://www.planetary[...]
2012-08-08
[56]
웹사이트
Orbiter Images NASA's Martian Landscape Additions
http://www.nasa.gov/[...]
2012-08-08
[57]
웹사이트
'Mount Sharp' on Mars Compared to Three Big Mountains on Earth
https://web.archive.[...]
NASA
2012-03-31
[58]
웹사이트
Curiosity's Quad – IMAGE
http://mars.jpl.nasa[...]
NASA
2012-08-11
[59]
웹사이트
NASA's Curiosity Beams Back a Color 360 of Gale Crate
https://web.archive.[...]
NASA
2012-08-11
[60]
뉴스
Mars rover makes first colour panorama
https://www.bbc.co.u[...]
2012-08-09
[61]
뉴스
Quad 51: Name of Mars base evokes rich parallels on Earth
https://www.usatoday[...]
2012-08-12
[62]
뉴스
'Impressive' Curiosity landing only 1.5 miles off, NASA says
http://www.cnn.com/2[...]
2012-08-20
[63]
뉴스
NASA Mars Rover Begins Driving at Bradbury Landing
https://web.archive.[...]
NASA
2012-08-22
[64]
뉴스
Mars Is Pretty Clean. Her Job at NASA Is to Keep It That Way.
https://www.nytimes.[...]
2015-10-06
[65]
뉴스
NASA、火星探査機MSLの打ち上げ延期
https://www.afpbb.co[...]
AFPBB News
2008-12-09
[66]
뉴스
新火星探査車、名前は「キュリオシティ」
https://www.astroart[...]
アストロアーツ
2009-06-06
[67]
뉴스
Mars Science Laboratory Launch
http://www.nasa.gov/[...]
[68]
뉴스
Sky Crane
http://marsprogram.j[...]
NASA JPL
2011-11-13
[69]
웹사이트
NASA Mars Rover Team Aims for Landing Closer to Prime Science Site
http://www.nasa.gov/[...]
NASA
2012-06-12
[70]
웹사이트
NASA Lands Car-Size Rover Beside Martian Mountain
http://www.nasa.gov/[...]
NASA
2012-08-06
[71]
웹사이트
NASA Mars Rover Begins Driving At Bradbury Landing ''Mars Science Laboratory Press Release''
http://mars.jpl.nasa[...]
JPL
2014-03-15
[72]
뉴스
火星表面を初めて掘削、生命の痕跡が見つかるか
http://www.yomiuri.c[...]
読売新聞
2013-02-10
[73]
뉴스
キュリオシティ火星着陸から1年、自分に記念演奏
https://www.cnn.co.j[...]
CNN
2014-03-15
[74]
웹사이트
New Mars Rover to Feature Morse Code
http://www.arrl.org/[...]
American Radio Relay League
2024-10-09
[75]
뉴스
Curiosity’s “JPL” Could Become “SOS”
http://www.spacesafe[...]
SpaceSafetymagazine
2014-04-12
[76]
뉴스
Yes, there seems to be a hole in Curiosity's left front wheel, and no, that's not a problem
http://www.planetary[...]
Planetary Society
2014-04-12
[77]
뉴스
Curiosity Team Upgrades Software, Checks Wheel Wear
http://www.jpl.nasa.[...]
JPL
2014-04-12
[78]
뉴스
6km走破のキュリオシティ、大規模調査の予定地点に到着
https://www.astroart[...]
アストロアーツ
2014-04-12
[79]
웹사이트
NASA、火星で有機分子を発見──生命が存在した可能性を示す新たな証拠か?
https://www.newsweek[...]
Newsweek
2018-06-15
[80]
웹사이트
火星の土壌に有機物発見、大気中メタンも NASA探査機
https://www.cnn.co.j[...]
CNN
2018-06-08
[81]
뉴스
NASA: Nuclear power generator hooked up to Mars rover
http://spaceflightno[...]
Spaceflightnow.com
2011-11-27
[82]
문서
NASA Curiosity Mars Rover Installing Smarts for Driving
http://www.nasa.gov/[...]
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com